-
Revision: v1.0
-
Revision Date: 2019-07-02
-
Group Prepared By: PUID Working Group
-
Feedback Email: rd-main@bluetooth.org
Revision History
|
Revision Number |
Date |
Comments |
|---|---|---|
|
v1.0 |
2019-07-02 |
Adopted by the Bluetooth SIG Board of Directors. |
Contributors
|
Name |
Company |
|---|---|
|
Hironari Ushikubo |
NTT DOCOMO |
|
Frank Berntsen |
Nordic Semiconductor |
Use of this specification is your acknowledgement that you agree to and will comply with the following notices and disclaimers. You are advised to seek appropriate legal, engineering, and other professional advice regarding the use, interpretation, and effect of this specification.
Use of Bluetooth specifications by members of Bluetooth SIG is governed by the membership and other related agreements between Bluetooth SIG and its members, including those agreements posted on Bluetooth SIG’s website located at www.bluetooth.com. Any use of this specification by a member that is not in compliance with the applicable membership and other related agreements is prohibited and, among other things, may result in (i) termination of the applicable agreements and (ii) liability for infringement of the intellectual property rights of Bluetooth SIG and its members.
Use of this specification by anyone who is not a member of Bluetooth SIG is prohibited and is an infringement of the intellectual property rights of Bluetooth SIG and its members. The furnishing of this specification does not grant any license to any intellectual property of Bluetooth SIG or its members. THIS SPECIFICATION IS PROVIDED “AS IS” AND BLUETOOTH SIG, ITS MEMBERS AND THEIR AFFILIATES MAKE NO REPRESENTATIONS OR WARRANTIES AND DISCLAIM ALL WARRANTIES, EXPRESS OR IMPLIED, INCLUDING ANY WARRANTIES OF MERCHANTABILITY, TITLE, NON-INFRINGEMENT, FITNESS FOR ANY PARTICULAR PURPOSE, OR THAT THE CONTENT OF THIS SPECIFICATION IS FREE OF ERRORS. For the avoidance of doubt, Bluetooth SIG has not made any search or investigation as to third parties that may claim rights in or to any specifications or any intellectual property that may be required to implement any specifications and it disclaims any obligation or duty to do so.
TO THE MAXIMUM EXTENT PERMITTED BY APPLICABLE LAW, BLUETOOTH SIG, ITS MEMBERS AND THEIR AFFILIATES DISCLAIM ALL LIABILITY ARISING OUT OF OR RELATING TO USE OF THIS SPECIFICATION AND ANY INFORMATION CONTAINED IN THIS SPECIFICATION, INCLUDING LOST REVENUE, PROFITS, DATA OR PROGRAMS, OR BUSINESS INTERRUPTION, OR FOR SPECIAL, INDIRECT, CONSEQUENTIAL, INCIDENTAL OR PUNITIVE DAMAGES, HOWEVER CAUSED AND REGARDLESS OF THE THEORY OF LIABILITY, AND EVEN IF BLUETOOTH SIG, ITS MEMBERS OR THEIR AFFILIATES HAVE BEEN ADVISED OF THE POSSIBILITY OF THE DAMAGES.
If this specification is a prototyping specification, it is solely for the purpose of developing and using prototypes to verify the prototyping specifications at Bluetooth SIG sponsored IOP events. Prototyping Specifications cannot be used to develop products for sale or distribution and prototypes cannot be qualified for distribution.
Products equipped with Bluetooth wireless technology ("Bluetooth Products") and their combination, operation, use, implementation, and distribution may be subject to regulatory controls under the laws and regulations of numerous countries that regulate products that use wireless non-licensed spectrum. Examples include airline regulations, telecommunications regulations, technology transfer controls and health and safety regulations. You are solely responsible for complying with all applicable laws and regulations and for obtaining any and all required authorizations, permits, or licenses in connection with your use of this specification and development, manufacture, and distribution of Bluetooth Products. Nothing in this specification provides any information or assistance in connection with complying with applicable laws or regulations or obtaining required authorizations, permits, or licenses.
Bluetooth SIG is not required to adopt any specification or portion thereof. If this specification is not the final version adopted by Bluetooth SIG’s Board of Directors, it may not be adopted. Any specification adopted by Bluetooth SIG’s Board of Directors may be withdrawn, replaced, or modified at any time. Bluetooth SIG reserves the right to change or alter final specifications in accordance with its membership and operating agreements.
Copyright © 2018–2019. All copyrights in the Bluetooth Specifications themselves are owned by Apple Inc., Ericsson AB, Intel Corporation, Lenovo (Singapore) Pte. Ltd., Microsoft Corporation, Nokia Corporation, and Toshiba Corporation. The Bluetooth word mark and logos are owned by Bluetooth SIG, Inc. Other third-party brands and names are the property of their respective owners.
1. Introduction
The Binary Sensor Service exposes two characteristics that are used for a protocol between the Server and a client to transfer the status of binary sensors on the server side.
1.1. Conformance
If conformance to this specification is claimed, all capabilities indicated as mandatory for this specification shall be supported in the specified manner (process-mandatory). This also applies for all optional and conditional capabilities for which support is indicated.
1.2. Service dependencies
This service is not dependent upon any other services.
1.3. Bluetooth Core Specification release compatibility
This specification is compatible with any Bluetooth Core Specification that includes the Generic Attribute Profile (GATT) portion of the Bluetooth Core Specification [1].
1.4. GATT sub-procedure requirements
Requirements in this section represent a minimum set of requirements for a Server implementing the Binary Sensor Service. Other GATT sub-procedures may be used if supported by both client and Server.
Table 1.1 summarizes additional GATT sub-procedure requirements beyond those required by all GATT servers.
|
GATT sub-procedure |
Requirements |
|---|---|
|
Write Characteristic Value |
M |
|
Indications |
M |
- M:
-
Mandatory
1.5. Transport dependencies
This service is specified for operation over the Bluetooth Low Energy (LE) transport.
1.6. Application error codes
This service does not define any application APA error codes. This service does not define any application Attribute Protocol Application error codes (as defined in [1] Volume 3, Part F).
1.7. Byte transmission order
All characteristics used with this service shall be transmitted with the least significant octet first (i.e., little endian). The least significant octet is identified in the characteristic definitions in [2].
1.8. Language
1.8.1. Language conventions
The Bluetooth SIG has established the following conventions for use of the words shall, must, will, should, may, can, is, and note in the development of specifications:
|
shall |
is required to – used to define requirements. |
|
must |
is used to express: a natural consequence of a previously stated mandatory requirement. OR an indisputable statement of fact (one that is always true regardless of the circumstances). |
|
will |
it is true that – only used in statements of fact. |
|
should |
is recommended that – used to indicate that among several possibilities one is recommended as particularly suitable, but not required. |
|
may |
is permitted to – used to allow options. |
|
can |
is able to – used to relate statements in a causal manner. |
|
is |
is defined as – used to further explain elements that are previously required or allowed. |
|
note |
Used to indicate text that is included for informational purposes only and is not required in order to implement the specification. Each note is clearly designated as a “Note” and set off in a separate paragraph. |
For clarity of the definition of those terms, see Core Specification Volume 1, Part E, Section 1.
1.8.2. Reserved for Future Use
Where a field in a packet, Protocol Data Unit (PDU), or other data structure is described as "Reserved for Future Use" (irrespective of whether in uppercase or lowercase), the device creating the structure shall set its value to zero unless otherwise specified. Any device receiving or interpreting the structure shall ignore that field; in particular, it shall not reject the structure because of the value of the field.
Where a field, parameter, or other variable object can take a range of values, and some values are described as "Reserved for Future Use," a device sending the object shall not set the object to those values. A device receiving an object with such a value should reject it, and any data structure containing it, as being erroneous; however, this does not apply in a context where the object is described as being ignored or it is specified to ignore unrecognized values.
When a field value is a bit field, unassigned bits can be marked as Reserved for Future Use and shall be set to 0. Implementations that receive a message that contains a Reserved for Future Use bit that is set to 1 shall process the message as if that bit was set to 0, except where specified otherwise.
The acronym RFU is equivalent to Reserved for Future Use.
1.8.3. Prohibited
When a field value is an enumeration, unassigned values can be marked as “Prohibited.” These values shall never be used by an implementation, and any message received that includes a Prohibited value shall be ignored and shall not be processed and shall not be responded to.
Where a field, parameter, or other variable object can take a range of values, and some values are described as “Prohibited,” devices shall not set the object to any of those Prohibited values. A device receiving an object with such a value should reject it, and any data structure containing it, as being erroneous.
“Prohibited” is never abbreviated.
1.9. Terminology
Initially capitalized terms used in this specification have the meanings ascribed to them in Table 1.2.
|
Term |
Definition |
|---|---|
|
Multiple Sensor |
Exists when there is more than one Sensor Element of the same type (open/closed [O/C], human detection [HD], or vibration [VIB]) in a device; together, all of the Sensor Elements of the same sensor type are a Multiple Sensor. |
|
Sensor Element |
A “physical” sensor with binary output connected to the device. |
|
Sensor State |
The Boolean state of the Sensor Element, where 0 and 1 represents closed and open or not-detected and detected. |
|
Sensor Status |
The combination of Sensor State and Count (the number of times Sensor State has changed from 0 to 1) in one 2-octet entity. |
|
Server |
A device implementing the Binary Sensor Service. This device can support more than one sensor. |
|
Single Sensor |
Exists when there is only one Sensor Element of a particular type in a device, even if there are other Sensor Elements of other sensor types. |
2. Service
2.1. Declaration
The service UUID shall be set to «Binary Sensor» as defined in [2].
2.2. Behavior
The Binary Sensor Service (BSS) monitors one or more binary sensors connected to the device. The status of the sensors (for example, on/off or open/closed) shall be reported when requested by a client device, when a sensor changes state, or at a regular interval controlled by a timer.
The Binary Sensor Service implements a protocol using two characteristics of the Binary Sensor Service. Commands are received on the BSS Control Point characteristic. Responses and unsolicited events are indicated to the BSS Response characteristic. The details of the protocol can be found in Section 4.
2.2.1. Timer
The Server may have a timer to schedule regular reports of the Sensor Status.
If a timer is implemented, the timer shall create an event at a given fixed rate. The interval shall be longer than or equal to the connection interval.
2.2.2. Sequence
This section contains more details about the behavior of the Binary Sensor Service.
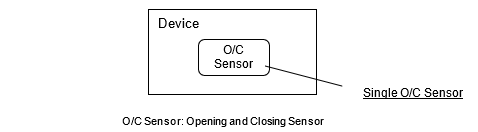
When the Server is unknown to the client (for example, after the first connection is established), the client will normally start with sending Get Sensor Status Command messages or Setting Sensor Command messages (as defined in Table 4.3) for all possible sensor types to discover which sensors are available in the sensor device. Figure 2.1 illustrates the discovery of a Server with a single open/closed (O/C) sensor.
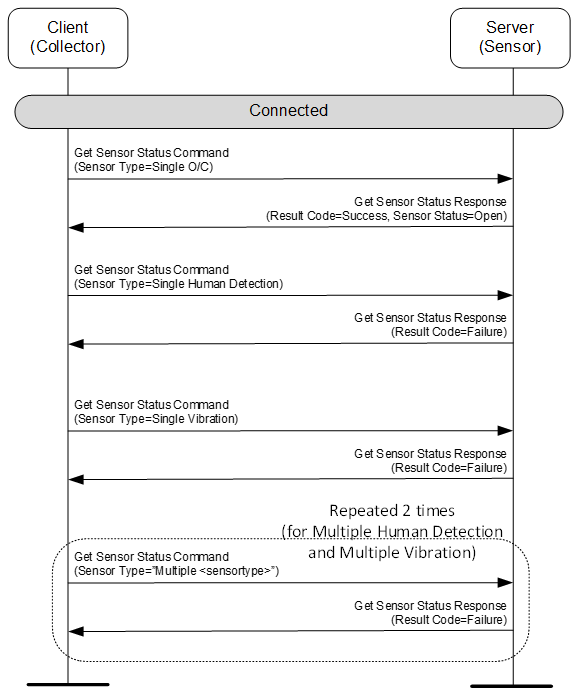
After this sequence, the client will know that this device has 1 O/C sensor.
Figure 2.2 illustrates the discovery of a device with 7 named vibration sensors.
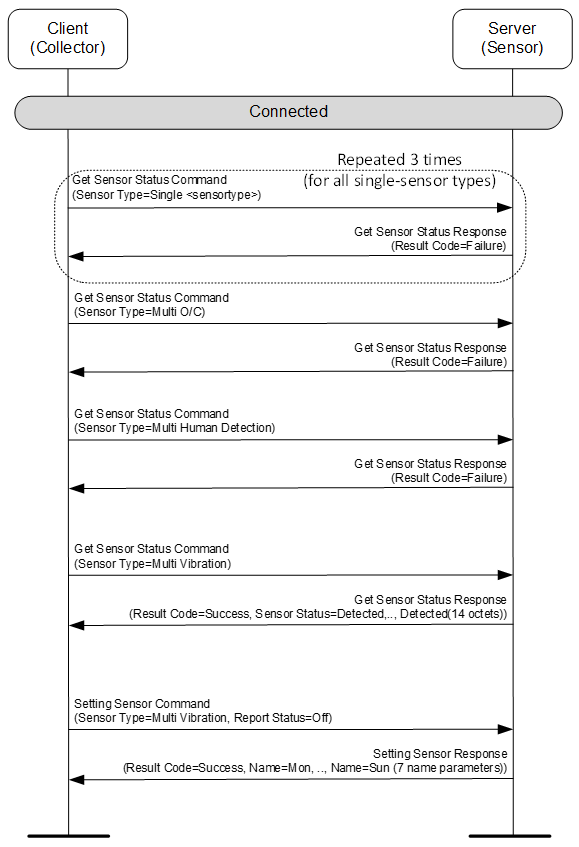
After this sequence, the client will know that the device has 7 vibration sensors named “Mon,” “Tue,” "Wed," "Thu," "Fri," "Sat," and ”Sun.”
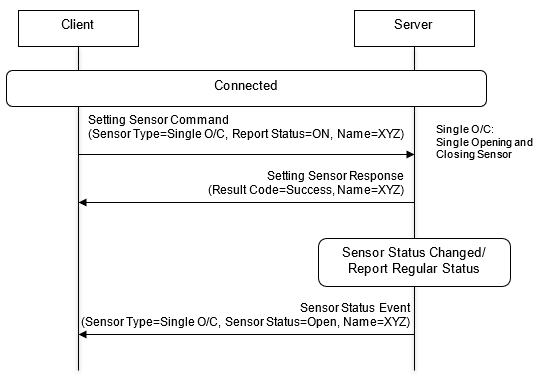
Triggered by the client request to start/stop notification, the Server responds with the sequence shown in Figure 2.3.
 |
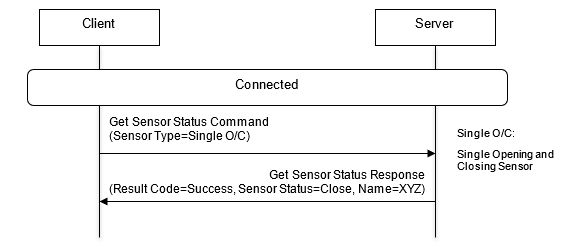
Triggered by the client request to obtain the current sensor value, the Server responds as shown in Figure 2.4.
 |
3. Service characteristics
This section defines the characteristic and descriptor requirements for the Binary Sensor Service. Table 3.1 defines the requirements for the two service characteristics.
|
Characteristic Name |
Requirement |
Mandatory Properties |
Optional Properties |
Security Permissions |
|---|---|---|---|---|
|
BSS Control Point |
M |
Write |
N/A |
Defined by higher-level specification. |
|
BSS Response |
M |
Indicate |
N/A |
Defined by higher-level specification. |
- M:
-
Mandatory
The structure of the service characteristics is defined in Table 3.2.
|
Split Header |
Payload |
|
|---|---|---|
|
Byte Order |
N/A |
LSO…MSO |
|
Data type |
uint8 |
Variable |
|
Size |
1 octet |
1 to 19 octets |
|
Units |
None |
None |
3.1. BSS Control Point
The BSS Control Point characteristics shall be used to receive the commands for the Server.
The structure of the characteristic is defined in Table 3.2.
3.1.1. Characteristic behavior
The Server shall implement the GATT Write Characteristic Value sub-procedure (as defined in [1] Volume 3, Part G). When the BSS Control Point is written using this procedure, the server shall interpret the Split Header field to assemble a complete command payload as described in Section 5. When a complete command is assembled, the Server shall execute the appropriate procedure as described in Section 4.
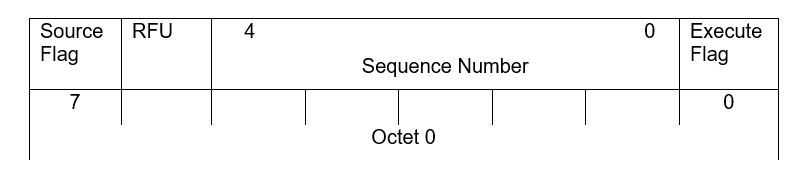
3.1.1.1. Split Header field
The Split Header field is used for reassembling commands.
Table 3.3 and Figure 3.1 describe the Split Header field.
|
Field Name |
Size(bits) |
Description |
Requirement |
|---|---|---|---|
|
Execute Flag |
1 |
Flag to indicate packet end |
M |
|
Sequence Number |
5 |
Sequence Number of split packets |
M |
|
RFU |
1 |
Reserved for Future Use |
- |
|
Source Flag |
1 |
Flag to indicate packet transmitted direction. |
M |
- M:
-
Mandatory
 |
See Section B.2 (Appendix B) for an example of the Split Header field usage.
3.1.1.1.1. Source Flag
The Source Flag is a simple mark to comprehend the direction of transmitted packets.
The Source Flag enables a service application to easily control and maintain data exchanges in packet level.
Table 3.4 describes values for the Source Flag.
|
Value |
Description |
|---|---|
|
0 |
Indicate direction from client to Server |
|
1 |
Indicate direction from Server to client |
3.1.1.1.2. Sequence Number
Sequence Number is an unsigned 5-bit integer (range 0 to 31) that indicates a sequence order of split packets.
When there is no split packet, the value 0x00 shall be set for a non-split packet.
3.1.1.1.3. Execute Flag
Execute Flag indicates that a split packet is terminated.
The service application can distinguish whether the packet is split or final by this flag.
Table 3.5 describes values for Execute Flag.
|
Value |
Description |
|---|---|
|
0 |
Split packet, not final packet |
|
1 |
Not a split packet or, indicates final packet |
For a packet that is not a split packet, Execute Flag shall be set to 1.
3.1.1.2. Payload field
The Payload field holds a fragment of command data.
3.2. BSS Response
The BSS Response characteristics shall be used to send responses and unsolicited events from the server.
The structure of the characteristic is defined in Table 3.2.
3.2.1. Characteristic behavior
When the Server executes any of the procedures described in Section 4, the Server shall set the Split Header field and the Payload field as described in Section 5 and indicate this characteristic for each fragment, by executing the GATT Indications sub-procedure, until the entire Payload is sent.
3.2.1.1. Split Header
The Split Header field is used in for reassembling commands. See Section 3.1.1.1 for the format of the Split Header field.
3.2.1.2. Payload
The Payload field is used to hold a fragment of the response or event data.
4. Protocol
This section defines the protocol used for the Server.
Procedures involve sending one or more messages between the service and a client device. For command procedures, the procedure is initiated by the Server receiving a command message and responding with a response message. For event procedures, the Server will send an event message without any request from a client.
Each message consists of a message identifier followed by one or more parameters.
The protocol defines two different sub-types of sensors, Single Sensor and Multiple Sensor.
-
If the Server has only one Sensor Element of the same type, that Sensor Element is a Single Sensor.
-
If the Server has more than one Sensor Element of the same type, those Sensor Elements are a Multiple Sensor.
See Appendix A for some examples of a Single Sensor and a Multiple Sensor in a device.
The procedure requirements are the same for both a Single Sensor and a Multiple Sensor, but some message formats are different.
The Server shall support at least one Single Sensor or one Multiple Sensor.
The Server may support a combination of several sensors, each of which can be either a Single Sensor or a Multiple Sensor.
The Server may support Named Sensors to allow a client to read and/or change the name for each individual sensor.
4.1. BSS Control Point and BSS Response procedures
Table 4.1 lists the procedures and options for the protocol.
|
Procedure |
Requirement |
Description |
|---|---|---|
|
Get Sensor Status Command |
M |
See Section 4.1.1 |
|
Setting Sensor Command |
M |
See Section 4.1.2 |
|
Sensor Status Event |
M |
See Section 4.1.3 |
|
Named Sensors |
O |
See Sections 4, 4.2.3, and 4.3.3.7 |
|
Single Sensor |
C.1 |
See Sections 4, 4.2.3, and 4.3.3.5 |
|
Multiple Sensor |
C.1 |
See Sections 4, 4.2.3, and 4.3.3.6 |
- M:
-
Mandatory
- O:
-
Optional
- C.1:
-
The Server shall support at least one Single Sensor or one Multiple Sensor.
These procedures are executed for one sensor type (any one value of the Sensor Type parameter) at a time.
4.1.1. Get Sensor Status Command procedure
When the Server receives a Get Sensor Status Command Message on the BSS Control Point characteristic, the Server shall respond with the Get Sensor Status Response message on the BSS Response characteristic.
If the Server has the requested sensor data, the Result Code parameter shall be set to Success and the Sensor Status parameter or the Multi Sensor Status parameter, depending on the value of the Sensor Type parameter, shall be set to Sensor State and Count (the number of times the Sensor State has changed from 0 to 1, as defined in Table 4.13) for each Sensor Element in the sensor.
If an internal error in the Server is preventing it from performing the action, the Result Code parameter shall be set to Failure, and the response shall not contain other parameters.
4.1.2. Setting Sensor Command procedure
When the Server receives a Setting Sensor Command message on the BSS Control Point characteristic, the Server shall perform the requested setting and shall respond with the Setting Sensor Response message on the BSS Response characteristic.
The Setting Sensor Command shall apply to the sensor that matches the sensor type provided in the Sensor Type parameter.
If the Server does not have any sensor with the specified sensor type, the Result Code parameter shall be set to Failure, and the response shall not contain other parameters.
If the command includes one or more Name parameters and the sensor does not support Named Sensors, the Result Code parameter shall be set to Failure, and the response shall not contain other parameters.
If an internal error in the Server is preventing it from performing the action, the Result Code parameter shall be set to Failure, and the response shall not contain other parameters.
The Server shall set the sensor notification status (as defined in Table 4.12) for the designated sensor to the state indicated by the Report Status parameter. The initial value of the notification status after connection establishment is Off.
If the command includes one or more Name parameters, and the Server supports Named Sensors, the Server shall set the sensor names of the individual sensors as specified by the Name parameters.
If the change of notification status and setting of sensor names is successful, the Server shall set the Result Code parameter of the response command to Success.
If the Server supports Named Sensors, the Server shall include one Name parameter for each individual sensor in the response command. If the command also included Name parameter(s), the Server shall report the names after the application of the command.
4.1.3. Sensor Status Event procedure
If the Server detects an event trigger, the Server shall send a Sensor Status Event on the BSS Response characteristic.
The event trigger can be one or more binary sensors changing the state, the timer indicating the time for a regular status report, or the sensor application deciding to halt reporting (for example, to conserve energy).
The following parameters shall be set in the message:
-
When the event trigger is a change in the sensor state, the Server shall set the Sensor Type parameter to the sensor type that detected the state change, and the Sensor Status parameter or Multiple Sensor Status parameter, depending on the value of the Sensor Type parameter, to the Sensor State after the state change and the Count for each Sensor Element in the sensor.
-
When the event trigger is a timer (scheduled status report), the Server shall set the Sensor Type parameter to the type of sensor being reported and the Sensor Status parameter or Multiple Sensor Status parameter, depending on the value of the Sensor Type parameter, to the Sensor State and Count at the time of the event trigger for each Sensor Element in the sensor.
-
When the event trigger is the sensor halting its reporting, the Server shall set the Cancel parameter to Stop Report.
4.2. Messages
Each message is composed of a message header followed by a message payload. The message header is sub-divided into four fields: Message ID, Number of Parameters, and two fields reserved for future use. The structure of a message is defined in Table 4.2.
|
LSO |
MSO |
|
Message Header |
Message Payload |
||||
|---|---|---|---|---|---|
|
RFU |
Message ID |
RFU |
Number of Parameters |
||
|
Byte Order |
- |
- |
- |
- |
LSO…MSO |
|
Data type |
- |
uint8 |
- |
uint8 |
- |
|
Size |
1 octet |
1 octet |
1 octet |
1 octet |
Variable |
|
Field Status |
M |
M |
M |
M |
M |
- M:
-
Mandatory
4.2.1. Message ID field
The Message ID identifies the type of the message.
The Message IDs are defined in Table 4.3.
|
Message ID |
Message |
Characteristic |
Requirement |
|---|---|---|---|
|
0x00 |
Get Sensor Status Command |
BSS Control Point |
M |
|
0x01 |
Get Sensor Status Response |
BSS Response |
M |
|
0x02 |
Setting Sensor Command |
BSS Control Point |
M |
|
0x03 |
Setting Sensor Response |
BSS Response |
M |
|
0x04 |
Sensor Status Event |
BSS Response |
M |
|
0x05 – 0xFF |
RFU |
- |
- |
- M:
-
Mandatory
4.2.2. Number of Parameters field
Number of Parameters indicates the number of parameters contained in the Payload.
|
Data Type |
Range |
|
|---|---|---|
|
Number of Parameters |
uint8 |
1 – 255 |
Note
Note: In practice, the number of parameters in a message might be limited to less than 255 because of the limitation of the Message Payload length (limited by the maximum payload length and the maximum number of segments in a message).
4.2.3. Message Payload field
Message Payload field contains one or more parameters.
The parameters included in a message are different for each Message ID. For the response messages and the event message, there are two different sets of parameters depending on whether the sensor type is a Single Sensor or Multiple Sensor. The requirements for each message type and sensor class are defined in Table 4.5.
|
Message |
Parameter 0 |
Parameter 1 |
Parameter 2 |
… |
Parameter N |
Parameter N+1 |
|---|---|---|---|---|---|---|
|
Get Sensor Status Command |
Sensor Type (M) |
(X) |
(X) |
(X) |
(X) |
(X) |
|
Get Sensor Status Response (Single) |
Result Code (M) |
Sensor Status (C.1) |
(X) |
(X) |
(X) |
(X) |
|
Get Sensor Status Response (Multiple) |
Result Code (M) |
Multiple Sensor Status (C.1) |
(X) |
(X) |
(X) |
(X) |
|
Setting Sensor Command |
Sensor Type (M) |
Report Status (M) |
Name (O) |
… |
Name (O) |
Name (O) |
|
Setting Sensor Response (Single) |
Result Code (M) |
Name (O) |
(X) |
(X) |
(X) |
(X) |
|
Setting Sensor Response (Multiple) |
Result Code (M) |
Name (O) |
Name (O) |
… |
Name (O) |
(X) |
|
Sensor Status Event (Single) |
Sensor Type (M) |
Sensor Status (M) |
(X) |
(X) |
(X) |
(X) |
|
Sensor Status Event (Multiple) |
Sensor Type (M) |
Multiple Sensor Status (M) |
(X) |
(X) |
(X) |
(X) |
|
Sensor Status Event (Stopping) |
Cancel (M) |
(X) |
(X) |
(X) |
(X) |
(X) |
- M:
-
Mandatory
- O:
-
Optional
- X:
-
Excluded
- C.1:
-
Mandatory when the Server successfully obtains sensor status; otherwise excluded
4.3. Parameters
Parameters include a field to identify a data type and a value. Each parameter in a message is composed of four fields; Parameter ID, Parameter Length, Parameter Value, and one field reserved for future use.
Table 4.6 shows the structure of a parameter.
|
LSO |
MSO |
|
Parameter ID |
Parameter Length |
RFU |
Parameter Value |
|
|---|---|---|---|---|
|
Byte Order |
- |
- |
- |
LSO…MSO |
|
Data type |
uint8 |
uint8 |
- |
- |
|
Size |
1 octet |
1 octet |
2 octets |
Variable The Parameter Length field defines the size, in octets, of the Parameter Value field. |
|
Requirement |
M |
M |
M |
M |
- M:
-
Mandatory
4.3.1. Parameter ID field
Parameter ID identifies the type of parameter. Parameter values are different depending on the parameter type.
Table 4.7 defines the parameter types.
|
Parameter ID |
Parameter |
Parameter Value Field Length |
Description |
Section |
|---|---|---|---|---|
|
0x00 |
Result Code |
1 octet |
Operation result in Server for request (command) from Client |
|
|
0x01 |
Cancel |
1 octet |
Stop notification of sensor status by Server event |
|
|
0x02 |
Sensor Type |
1 octet |
Sensor type |
|
|
0x03 |
Report Status |
1 octet |
Notification On/Off |
|
|
0x04 – 0x09 |
RFU |
- |
Reserved for Future Use |
- |
|
0x0A |
Sensor Status |
2 octets |
Sensor status |
|
|
0x0B |
Multiple Sensor Status |
variable |
Sensor status aggregated for the whole sensor |
|
|
0x0C |
Name |
variable |
Sensor name |
|
|
0x0D – 0xFF |
RFU |
- |
Reserved for Future Use |
- |
4.3.2. Parameter Length field
Parameter Length defines the data size of the Parameter Value field.
|
Data Type |
Range |
Units |
|
|---|---|---|---|
|
Parameter Length |
uint8 |
1 – 255 |
octet |
Note
Note: In practice the length of each parameter in a message might be limited to less than 255 because of the limitation of the Message Payload length (limited by the maximum payload length and the maximum number of segments in a message).
4.3.3. Parameter Value field
Parameter Value has different formats depending on the Parameter ID.
Available values are described in Sections 4.3.3.1 to 4.3.3.7.
4.3.3.1. Result Code
Result Code indicates operation results in the Server for a request (command) from the client.
Table 4.9 describes the values of the Result Code.
|
Parameter Value |
Parameter |
Description |
|---|---|---|
|
0x00 |
Success |
Normal completion |
|
0x01 |
Failure |
Requested operation not performed |
|
0x02 – 0xFF |
RFU |
Reserved for Future Use |
4.3.3.2. Cancel
Cancel indicates that the sensor has stopped notification of sensor status.
Table 4.10 describes the value of the Cancel parameter.
|
Parameter Value |
Parameter |
Description |
|---|---|---|
|
0x00 |
Stop Report |
Notification of sensor status from this Server was stopped. |
|
0x01 – 0xFF |
RFU |
Reserved for Future Use |
4.3.3.3. Sensor Type
Sensor Type indicates type of sensor.
Table 4.11 describes the values of the Sensor Type.
|
Parameter Value |
Parameter |
Description |
|---|---|---|
|
0x00 |
Opening and closing sensor |
Message applies to an opening and closing sensor. |
|
0x01 |
Human detection sensor |
Message applies to a human detection sensor. |
|
0x02 |
Vibration sensor |
Message applies to a vibration sensor. |
|
0x03 – 0x7F |
RFU |
Reserved for Future Use |
|
0x80 |
Multiple opening and closing sensor |
Message applies to a multiple opening and closing sensor. |
|
0x81 |
Multiple human detection sensor |
Message applies to a multiple human detection sensor. |
|
0x82 |
Multiple vibration sensor |
Message applies to a multiple vibration sensor. |
|
0x83 – 0xFF |
RFU |
Reserved for Future Use |
4.3.3.4. Report Status
The Report Status indicates whether event status notifications are turned on or off.
Table 4.12 describes the values of the Report Status.
|
Parameter Value |
Parameter |
Description |
|---|---|---|
|
0x00 |
Off |
Stop event notification of Sensor Status |
|
0x01 |
On |
Start event notification of Sensor Status |
|
0x02 – 0xFF |
RFU |
Reserved for Future Use |
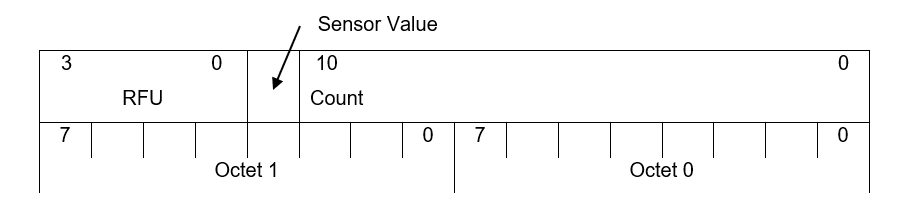
4.3.3.5. Sensor Status
Sensor Status indicates sensor status.
Sensor Status shall have the format shown in Table 4.13 and Figure 4.1.
|
Field Name |
Size (bits) |
Description |
|---|---|---|
|
Count |
11 |
A value from 0 to 2047 indicating the number of times the Sensor State has changed from 0 to 1. When the Count reaches 2047, the count restarts at 0. |
|
Sensor State |
1 |
Indicates the sensor state.
|
|
RFU |
4 |
Reserved for Future Use |
 |
4.3.3.6. Multiple Sensor Status
Multiple Sensor Status indicates sensor status of a Multiple Sensor. Multiple Sensor Status shall contain one Sensor Status field for each Sensor Element in the sensor.
Multiple Sensor Status shall have the format shown in Table 4.14.
|
LSO |
MSO |
|
Sensor Status 0 |
Sensor Status 1 |
... |
Sensor Status N-1 |
|
|---|---|---|---|---|
|
Byte Order |
LSO…MSO |
LSO…MSO |
… |
LSO…MSO |
|
Data type |
struct*2 |
struct*2 |
… |
struct*2 |
|
Size |
2 octets |
2 octets |
… |
2 octets |
- Note 1:
-
N is the number of Sensor Elements in the Multiple Sensor.
- Note 2:
-
The struct for each Sensor Element complies with the format described in Section 4.3.3.5.
The Parameter Length for Multiple Sensor Status is 2 times the number of sensor elements. (Parameter Length = N * 2)
Multiple Sensor Status shall be treated as a sensor group status for the same type of sensors.
The Sensor Status for the Sensor Elements shall be collated in the same order in all reports. That is, Sensor Status 0 will always represent the same Sensor Element, as will Sensor Status 1, Sensor Status 2, and so forth through Sensor Status N-1.
4.3.3.7. Name
Name indicates sensor name.
Name shall have the format shown in Table 4.15.
|
LSO |
MSO |
|
Name |
|
|---|---|
|
Byte Order |
LSO…MSO |
|
Data type |
UTF8 |
|
Size |
Variable (Parameter Length) octets |
The length of a Name parameter value shall be from 1 to 32 octets.
5. Split transmission
The number of sensors and the sensor status data are different for each Server. To support various kinds of Servers for different usages, the Server might need to support messages longer than the size of the payload for the service characteristic (either the BSS Control Point characteristic or the BSS Response characteristic), as defined in Table 3.2. When a message exceeds the size of the payload that can be exchanged in a single message, the message will be transmitted using the procedures in this section.
The maximum payload for the BSS Control Point characteristic is referred to as Max Payload in Section 5.1.
5.1. Split transmission procedures
If the total size of the message is greater than Max Payload, multiple segments shall be sent over the BSS Control Point or BSS Response characteristic to send all of the data.
See Section 0.2 (Appendix B) for an example of how segmentation and reassembly works (split data transmission).
Table 5.1 lists the requirements for segmentation and reassembly procedures for the Server.
|
Procedure |
Requirement |
Description |
|---|---|---|
|
Segmentation |
C.1 |
See Section 5.1.1 |
|
Reassembly |
C.2 |
See Section 5.1.2 |
- C.1.
-
Mandatory if the Server has more than three Sensor Elements of the same type; otherwise excluded.
- C.2:
-
Mandatory if the Server supports the Named Sensors option; otherwise excluded.
5.1.1. Segmentation procedure
The number of segments (N) needed for transfer of the total message shall be calculated as:
|
N = Message size (octets) / Max Payload (octets), rounded up to the nearest whole number |
The value of the Execute Flag bit of the Split Header field shall be set to 1 for the last segment transmitted; otherwise, it shall be set to 0.
The value of the Sequence Number field of the Split Header field shall be set to 0 for the first segment transmitted and incremented by one for each subsequent segment.
For each segment sent, the value of the Payload field shall be set to the next default Max Payload octets of the message or the remaining octets of the message, whichever is the smaller.
5.1.2. Re-assembly procedure
The receiving device shall check the value of the Execute Flag bit and the value of the Sequence Number field of the Split Header field for each received segment.
If the value of Sequence Number of the Split Header field is 0, the receiver shall start assembly of a new message. If the previous message is not complete, any data received shall be discarded.
If the value of the Sequence Number field of the Split Header field is not 0 and is not equal to the value of the Sequence Number field of the Split Header field for the previous segment incremented by 1, the receiver shall wait for the next Split Header with a value of 0 for the Sequence Number field.
If the Execute Flag bit of the Split Header field is 1, the receiver shall consider the message complete.
6. Acronyms and abbreviations
|
Acronym/Abbreviation |
Meaning |
|---|---|
|
BS |
Binary Sensor |
|
BSS |
Binary Sensor Service |
|
GATT |
Generic Attribute Profile |
|
HD |
human detection sensor |
|
LSO |
Least Significant Octet |
|
MSO |
Most Significant Octet |
|
O/C |
open/closed sensor |
|
RFU |
Reserved for Future Use |
|
UUID |
Universally Unique Identifier |
|
VIB |
vibration sensor |
7. References
[1] Bluetooth Core Specification, Version 5.0 or later
[2] Characteristic and Descriptor descriptions are accessible via the Bluetooth SIG Assigned Numbers
Appendix A. Examples of Single Sensor and Multiple Sensor
Example of a device equipped with one sensor (i.e., a Single Sensor).
 |
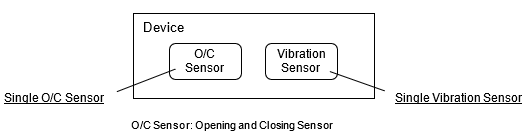
Example of a device equipped with two Sensor Elements that are not the same type, making each a Single Sensor.
 |
Example of a device equipped with two Sensor Elements of the same type (both of the Sensor Elements together are referred to as a Multiple Sensor).
 |
Example of a device with one Single Sensor and one Multiple Sensor.
 |
Appendix B. Examples of Split Header with Segmentation Sequence
B.1. Non-split data transmission
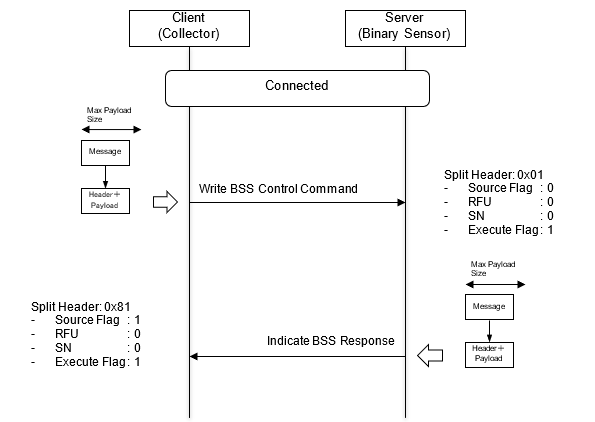 |
B.2. Split data transmission
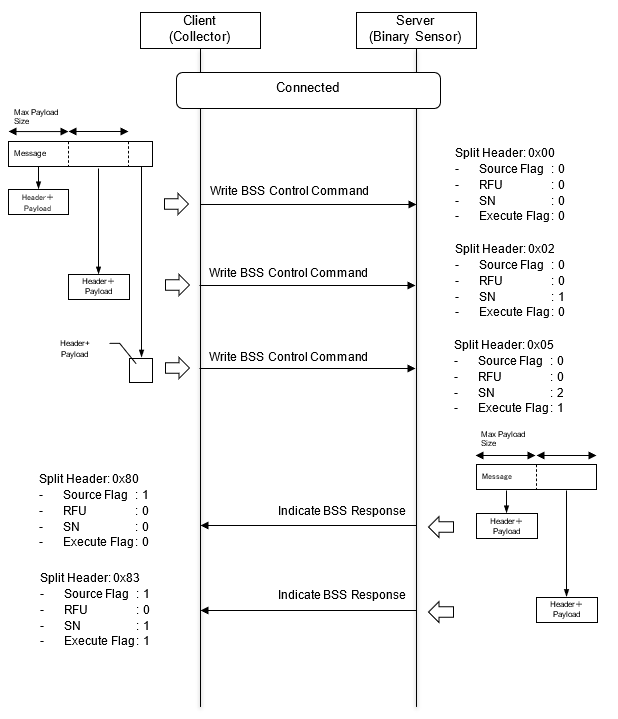 |